为拓宽我院师生科研视野、促进院校间学术交流,应自动化学院邀请,2024年11月21日,国家杰青、优青、中国科学技术大学博士生导师秦家虎教授作了题为“移动机器人运动规划与控制”的学术报告。报告会由自动化学院院长胡军教授主持,学科方向带头人、骨干教师、相关学院教师及硕博研究生等90余人在线参会。
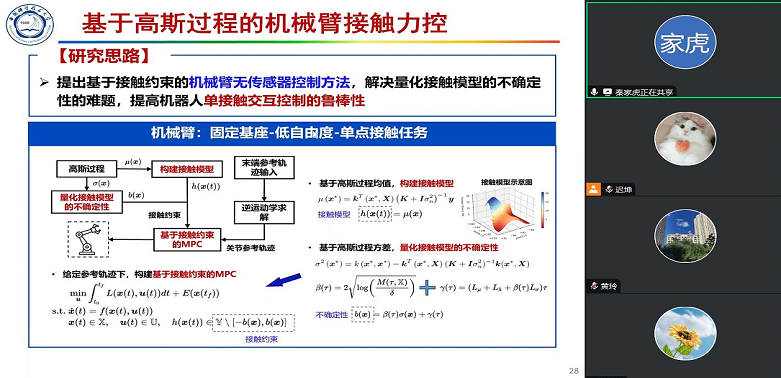
报告会上,秦家虎教授以移动机器人的实际应用为切入点,分别介绍了其在自主导航、运动规划与控制方面的关键技术和发展趋势。特别地,针对移动机器人运动规划与控制这一研究热点,系统介绍了团队目前在动态环境下、未知接触下、交互式多机器人的运动规划与控制三个方向的最新研究进展,包括基于控制屏障函数的安全最优控制方法、基于接触约束的机械臂无传感器控制方法、基于交互式安全指数的端到端运动规划方法等成果,可提升机器人在运动、避障及交互下的安全性和鲁棒性,在无人机竞速、多机器人协同导航和基于AR智能人机交互等场景得到应用。
本次报告会学术氛围浓厚,秦家虎教授结合自身经验分享了如何将理论与应用研究进行融合的方法。最后,多位师生还与秦家虎教授进行了深入交流和讨论,不仅了解了相关领域的学术前沿动态,更激发了学院师生的创新研究活力。
秦家虎教授作学术报告
报告专家简介:秦家虎,中国科学技术大学教授、博导,主要研究兴趣为自主智能系统协同、优化与决策。在相关领域出版Springer英文专著2部,发表SCI论文100余篇,授权中国发明专利40余项。主持国家杰出青年基金、优秀青年基金、联合基金重点项目、霍英东青年教师基金、科技创新2030—“新一代人工智能”重大项目课题等国家和省部级项目10余项。入选国家创新人才引进计划青年项目、中国科学技术大学“学术领军人才培养计划”;获中国自动化学会自然科学奖一等奖一项(排名1)、中国自动化学会技术发明奖一等奖一项(排名1)、黑龙江省自然科学一等奖一项(排名3)、中国自动化学会“青年科学家奖”、中国科学院“卢嘉锡青年人才奖”、中国科学院“优秀导师奖”、中国控制会议“关肇直”最佳论文奖以及IEEE工业电子学会最佳会议论文奖。目前担任中国指挥与控制学会“智能控制与系统专委会”主任委员、中国自动化学会“青年工作委员会”副主任委员、中国仿真学会“智能物联系统建模与仿真专委会”副主任委员,以及IEEE TIE、IEEE TII、IEEE TCNS、《自动化学报》、《智能科学与技术学报》等期刊编委。